

|
|
Tutorial: Position TrackingSkill Level: BeginnerKnowing where you are is vital to getting to where you want to be. Both of the previous tutorials (Goal Seeking and Maze Mapping) make use of the bot's location, as would more advanced algorithms. Knowing the bot's orientation too will be relevant for a number of tasks. The AMazeBot system provides methods to determine a bot's location and orientation, but they are convenience methods rather than essential methods. This means that it's possible to achieve their full functionality by using your own code; those methods are only intended to help you get your bot working quickly and with minimal effort. Thereafter they should be replaced in order to improve efficiency, and this tutorial will get you started.
Now, consider that we can obtain the bot's starting position and direction for free. Suppose we were to do this before entering the bot's main loop, and store the information in a pair of varibales. If we were to update these variables appropriately whenever the bot moves or turns, then we would always have the current position and direction, and never need to waste energy asking the system for this information. This is the basis of position trakcing. Let's simplify things by starting with the empty maze as described in the Goal Seeking tutorial. This is how to obtain the starting information: Point pos = bot.getStartPosition(); Compass dir = bot.getStartDirection(); On the empty maze we'd find that initially the position is (0, 0) and
the direction is if (bot.move(MOVE.FORWARD))
{
if (dir == Compass.EAST) pos.x++;
else if (dir == Compass.SOUTH) pos.y++;
// Notice that the other 2 directions aren't handled here...
// You would have to add code for that yourself!
}
This works, but it looks a bit messy. We've only shown you how to handle
2 of the direction but you'd need another 2 lines of
code to handle the rest. Is there any way we
can reduce the number of lines of code needed? We could
of course stick this code into a method, but there is
another way. The sample bot included in the devkit demonstrates
the use of a method from the pos = addPoints(pos, dir.getVector()); This single line of code accomplishes exactly what 4 lines of "messy"
code would. The This simplifies our code nicely, and you may find that adding points
comes in handy in other parts of your algorithm. You
can also subtract points with the Now we have our position variable being updated correctly if the bot has moved. But what if it hasn't? It's fine that we don't update the position variable, but shouldn't we do something? Borrowing an idea from the Goal Seeking tutorial, we'll just turn the bot left. Now we must remember to update our direction variable, so that the next time the bot does move forward, the correct vector will be added to the position. We won't provide the code to do that here, but you should be able to find what you need in the sample bot. Good luck! |
|
|
AMazeBot is © 2003-2016
Mohawk
College. 

|
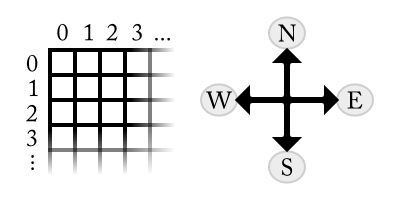 First,
let's review the AMazeBot coordinate system. The maze
is a square grid that is 44 cells on each side. The
top-left cell has coordinates (0, 0) and the coordinates
increase toward the right and toward the bottom. Thus
the bottom-right cell has coordinates (43, 43). Directions
are specified not in terms of up & down, left & right;
rather we use the standard compass directions.
First,
let's review the AMazeBot coordinate system. The maze
is a square grid that is 44 cells on each side. The
top-left cell has coordinates (0, 0) and the coordinates
increase toward the right and toward the bottom. Thus
the bottom-right cell has coordinates (43, 43). Directions
are specified not in terms of up & down, left & right;
rather we use the standard compass directions.